
Abstract
We study a nonlinear PDE which descibes monoparametric families of orbits on a certain surface produced by two-dimensional potentials. We face the following version of the direct problem of Newtonian Dynamics: Given a surface S and a two-dimensional potential \(V = V(u,v)\), determine all the isoenergetic families of orbits \(f(u,v) = \)c (\(c = const.\)), that is, families of orbits which are traced by a test particle with the same preassigned value of the total energy \({\mathcal {E}} = {\mathcal {E}}_{0}\). We are interested especially in those orbits which are described by energy \({\mathcal {E}}_{0}\) = 0. Thus, using Merten’s equation (ZAMM 61:252–253, 1981), we establish a new, nonlinear PDE for the “slope function” \(\gamma \) = \({\frac{{f_{v}}}{{f_{u}}}}\) which represents well the corresponding family of orbits \(f(u,v) = c\) on the given surface S. We find two necessary and sufficient differential conditions, one for the potential V = V (u, v) and another one for the slope function \(\gamma \), so that the above PDE has solution. Furthermore, we determine the general solution of the above PDE. Not only real but also complex potentials can produce these families of orbits on the given surface S. Several examples are offered.
Similar content being viewed by others

1 Introduction
The inverse problem of dynamics, as introduced by [2], seeks all the potentials \(V = V(x,y)\) which can generate a monoparametric family of planar orbits \(f(x,y) = c\), traced in the (x, y)-Cartesian plane by a material point of unit mass, with a pre-assigned dependence \({\mathcal {E}} = {\mathcal {E}}(f(x,y))\) of its total energy on the given family. It results a first-order partial differential equation, linear in the unknown function \(V = V(x,y)\) whose coefficients depend on the family of orbits. Later, Szebehely’s equation was studied by many authors, e.g. [3,4,5]. In [6], the author presented a second order linear partial differential equation providing all the potential functions \(V = V(x,y)\) which give rise to a pre-assigned family of planar curves \(f(x,y) = c\). Bozis’ equation does not include the energy \({\mathcal {E}}\) and consequently no assumption about the energy dependence \({\mathcal {E}} = {\mathcal {E}}(f)\) needs to be made. A review on basic facts of the inverse problem of dynamics was made in [7]. For the planar inverse problem, isoenergetic families of orbits were studied in [8]. These orbits are important for many reasons (see also [8]):
-
I. Among others these are the simplest sets of orbits.
-
II. For \({\mathcal {E}}\) = \({\mathcal {E}}_0\) (and exclusively for this case), the first order partial differential equation [1] can be used for solving the direct problem, i.e. if the potential is given, then find the isoenergetic family of orbits.We notice here that if the family of orbits is not isoenergetic and the family \(f(u,v) = c\) is unknown, then the function \({\mathcal {E}}\) = \({\mathcal {E}}(f)\) is unknown too and the equation [1] cannot be used. We can use the second order PDE given by [4] to determine the potential function V = V(u, v).
-
III. For the case of isoenergetic families of orbits, the zero velocity curves (ZVC) of all members of (1) are common and coincide with the family boundary curves (FBC) defined by [9]. If the family of orbits is not isoenergetic, each member of the family (1) has its own ZVC (open or closed).
Moreover, isoenergetic families of orbits in anisotropic potentials were studied in [10].
In [1], the author studied a family of curves \(f(u,v) = c\) on a surface S in 3-D space using Szebehely’s method and obtained a linear partial differential equation in the potential function V(u, v). Furthermore, in [4] a second order partial differential equation of hyperbolic type for the potential V in which all the coefficients are known functions of the coordinates (u, v) was derived and some examples were given. In [11], the author determined the expressions for the covariant components \(Q_{1}, \; Q_{2}\) of forces acting on a test particle which describes orbits on a given surface, using the procedure of Dainelli [12]. A generalization of Szebehely’s problem to include holonomic conservative mechanical systems with n-degrees of freedom was made in [13, 14]. Especially, in [15], they introduced the notion of the family boundary curves (FBC) for that version of the inverse problem of dynamics which combines the potential V(u, v) with a monoparametric family of regular orbits f(u, v) = c on the configuration manifold (\(M_{2}, \; g\)) of a conservative holonomic system with n = 2 degrees of freedom. Several examples were given there. Furthermore, in [16], the case of a generalized force field which gives rise to a two-parametric family of curves on the given surface was studied. In [17], the authors studied monoparametric families of orbits on a given surface and found linear or quadratic integrals of motion. Solvable cases of Merten’s PDE [1] were studied in [18] and several examples were given; isoenergetic families of orbits on a given surface produced by homogeneous potentials were examined in [19].
In the present paper we shall reconsider Merten’s equation [1] and we shall deal especially with isoenergetic families of orbits on a given surface. In Sect. 2 we give a full description of the problem. We examine the problem from the direct viewpoint namely if a certain potential is given, then we determine all the families of regular orbits with a constant value of energy and especially with \({\mathcal {E}}\) = 0. So, we establish a new, nonlinear PDE for the “slope function” \(\gamma \) = \(\displaystyle {\frac{{f_{v}}}{{f_{u}}}}\) (this is PDE (9)) in the text. Furthermore, we consider a class of isothermic surfaces and we study the problem on these surfaces (this is PDE 13) in the text). In Sect. 3, we find a necessary and sufficient condition for the potential function V(u, v) and another one for the ”slope function” \(\gamma \) so that this PDE has solution. Then we proceed more and construct the general solution of the above PDE. Potentials which produce isoenergetic families of orbits on a given surface are generally complex but in some cases we can find real ones. In Section 4 we give pertinent examples and we focus on real potentials. In Section 5 we examine several solvable cases of the PDE (9). In Section 6 we make some conclusions.
2 A Nonlinear PDE for Isoenergetic Families of Orbits
In an Euclidean 3D-space \({\mathbb {E}}^3\) with an orthonormal Cartesian system of reference Oxyz we consider a smooth surface S with parametric representation \(\bar{\mathbf{x }} = \bar{\mathbf{x }}(u,v)\) where u, v are curvilinear coordinates. On this surface we also consider a monoparametric family of regular curves given in the solved form
where c = const. is the parameter of the family (1). For the given family of orbits we define the slope function \(\gamma \) by the relation
where the subscripts denote differentiation with respect to u or v. The slope function \(\gamma \) represents the family (1) in the sense that if the family (1) is given, then \(\gamma \) defined in (2 is determined uniquely. On the other hand, if \(\gamma \) is given, we can obtain a unique family (1) from the relation
The inverse problem of dynamics consists of finding potentials V for which this family of curves (1) lies on the given surface S and are trajectories. The first fundamental form on the surface S in this system of parameters is given by
where
and the symbol ”\(\cdot \)” denotes the scalar product in \({\mathbb {E}}^3\).
Now, we consider a particle of unit mass which describes any member of the given family (1). Here, we have to clear out that trajectories are bound to a given surface by constraints. The kinetic energy (T) of the test particle is given by
where the ”dot” denotes differentiation with respect to time.
Mertens [1] produced a linear, first order partial differential equation for the potential function \(V = V(u,v)\) for any pre-assigned dependence \({\mathcal {E}} = {\mathcal {E}}(f)\), of the total energy \({\mathcal {E}}\) of the given family \(f = f(u,v)\). This equation reads
where
The second differential operator of Beltrami is given by [20]
where \(P = P(u,v)\) is an analytic function.
2.1 A New Formulation of Mertens’ Equation (5)
In this paragraph we shall write the Eq. (5) in a different way. Indeed, with the use of the slope function \(\gamma \) and of the notation \(Z : = \gamma \gamma _{u}-\gamma _{v}\), the Eq. (5) can be written as follows:
where
and \({\varGamma }_{jk}^l\) (\(j, \; k, \; l\) = 1, 2) are the Christoffel’s symbols of the second kind.
2.2 Isoenergetic Families of Orbits
An interesting case of regular orbits is the so-called “isoenergetic orbits”, i.e., orbits for which the energy is maintained constant (\({\mathcal {E}}\) = \({\mathcal {E}}_{0}\)) along all members of the family. As we explained in the Introduction, we consider especially the case for which \({\mathcal {E}}_{0}\) = 0. This means that we focus our attention on the zero level set of the energy integral and consider only monoparametric families of orbits that lie on this set. Now, we pose the following problem:
“Given a potential V(u, v), can we find all the families of isoenergetic orbits which are traversed with energy \({\mathcal {E}}_{0} = 0\) by a test particle of unit mass?”
To answer this question we have to write the PDE (7) in a different way. In doing so, we end up to the following nonlinear PDE:
where
In what follows we introduce isothermal coordinates on S, i.e., coordinates (u, v) for which the metric (4) of it takes the form
Then, from (8) we have
Now, from (10) we take:
where
and then the PDE (9) reads:
Remark 1
In the planar case (E = G = 1, F = 0), the Eq. (13) coincides with that given in [3].
By using (11), the second differential operator of Beltrami given by (6) takes the form
3 The General Solution of the PDE (13)
The PDE (13) is a nonlinear PDE in the unknown function \(\gamma \). The first step in solving the nonlinear PDE (13) is the formulation of the corresponding characteristic ODE-system:
for \(\gamma \), u, v regarded now as functions of one independent variable s.
3.1 One Differential Condition for the Potential V(u, v)
Our purpose is to find two first independent integrals of the PDE (13). To this end, we multiply the first of equations (15) by \(\xi _{1}\), the second one by \(\xi _{0}\) and we subtract member by member. In doing so, we obtain the relation
Secondly, combining the third of Eqs. (15) with (16), we end up to the ODE
The ODE (17) is integrable when
which is equivalently written as follows:
or, in a simpler form,
We can also write Eq. (18) as folows:
So, if we select the potential function such that the relation (19) is satisfied, then we can find a first integral of the PDE (13). In view of (14), the Eq. (19) takes the form
Thus, we end up to a Laplace’s equation for the function \(P(u,v) = V(u,v)E(u,v)\). The function P(u, v) is a harmonic function. Putting
the general solution of Eq. (20) is
where A(z), \(B(\bar{z})\) are arbitrary functions. The last Eq. (21) is written as follows:
where K, L are arbitrary functions of their arguments. Thus, from (22) we determine the potential function V(u, v)
Remark 2
In view of (23), we observe that not only real but also complex potentials can appear as solutions to the problem. Consequently, if the potential function satisfies the differential condition (19), or it is of the form (23), then the ODE (17) is integrable. Complex potentials producing families of complex orbits in the planar problem were studied in [21].
Now, we shall look for an analytic function \({\varPhi (u,v)}\) for the ODE (17) such that
From (22) we have
where the prime denotes differentiation of the functions K and L with respect to their argument, respectively. From (24) and (25) we find the analytic function \({\varPhi }(u,v)\) (up to an additive constant). It is
Now, the ODE (17) together with (24) leads to
Integrating (26), we find
where \(c_{1}^{*}\) = const. Without loss of generality, we will consider that the constant \(c_{1}^{*}\) is complex and it is related with another constant \(c_{1}\) as follows:
Thus, from (27) and (28), we take
Now, we can formulate the following:
Proposition 1
If the given potential function V(u, v) satisfies the relation (19), then a first integral of the PDE (13) exists and it is given by (29).
3.2 One Differential Condition for the Slope Function \(\gamma \)
Up to now, we have found one first integral of the PDE (13) and we need one more. We shall deal with the first two equations of (15). From (15), we have
Our aim is to find a multiplier \(\sigma (u,v)\) of the ODE (30) such that
where \(h = h(u,v)\) is an arbitrary function. The ODE (31) is integrable when
We compute the expression \(M = (\Delta _{2}h)E\) of the function h taking into account (14):
or, equivalently,
Solving the system (32) and (33) with respect to \(\sigma _{u}\) and \(\sigma _{v}\), we find
Hence, we obtain
By using (34), it turns out
The ODE (35) is integrable, if there exists an analytic \(C^2\)-function \({\varTheta }\) = \({\varTheta }(u,v)\) such that
The integrability condition \({\varTheta }_{uv} = {\varTheta }_{vu}\) leads to the fact
or, in view of (14), to the differential relation
Thus, if the relation (37) is true, then the ODE (35) is integrable and can be written in the form
from which we can find the function \(\sigma (u,v)\) (up to a multiplicative constant). So, we conclude:
By combining (36) and (24), we can first derive
After some straightforward calculations, we take from (39)
Taking into account (29) and the fact that
the multiplier \(\sigma (u,v)\) can be written as follows:
We transpose the Eq. (30) into complex variables \(z, \; \bar{z}\) and we get
or, equivalently,
Now, in view of (41), we have to find an analytic function \(T(z,\bar{z})\) such that
or, in view of (29),
Thus, we get
The constant \(c_{2}\) in (42) is the second integral for the solution of the PDE (13). Now, we can formulate the following:
Proposition 2
If the function \(\gamma \) given by (27) satisfies the relation (37), then a second integral of the PDE (13) exists and it is given by (42). So, the ODE (30) is integrable.
To this end, the general solution of the PDE (13) is given by
where \({\mathcal {F}}\) is an arbitrary function of two arguments. Finally, we can formulate the following:
Corollary 1
For any potential function \(V = V(z, \bar{z})\) of the form (23) (real or complex), the totality of families of orbits \(\gamma = \gamma (u,v)\) (real or complex) lying on the hypersurface \({\mathcal {E}}_{0} = \)0 is given by the implicit form (43).
3.3 An Appropriate Selection of the Slope Function \(\gamma \)
The slope function \(\gamma = \gamma (u,v)\) can be found from the relation (43) which is given in implicit form. Taking into account the two relations (29) and (42), we can select a suitable expression of the function \({\mathcal {F}}\) in (43) from which we will be able to find ‘’a” solution for the slope function \(\gamma \). This technique will help us to find an analytic expression for the slope function \(\gamma = \gamma (u,v)\). Thus, we take
If we replace (29) and (42) into (44), then we take
Using the identity \(e^{iw} = cosw+isinw\), we obtain
Thus, we have
Combining the relations (45) and (46), we find
From (47) we obtain the slope function \(\gamma \). It is
We notice that all the isoenergetic families of orbits given by (48) are complex.
Synthesis of the Problem
1. Choose a regular surface with isothermal net \(E = G, \; F = 0\).
2. Select the appropriate functions \(K(z), \; L(\bar{z})\) and determine the potential function \(V = V(u,v)\) from (23).
3. Using (42), find analytically the expressions of \(k(z), \; l(\bar{z})\).
4. Calculate \(\tilde{A}\) from (47) and then find \(\gamma \) from (48).
5. Check the PDE (13).
4 Pertinent Examples
4.1 Complex orbits produced by complex or real potentials
In this paragraph we shall offer pertinent examples for the general case.
Example 1
We consider the sphere with parametric representation
Then, the components of the metric tensor are
(a) Complex potential producing a family of complex orbits: First of all, we select
and we determine the potential function from (23). It is
Now, we can find the first independent integral of the PDE (13) from (29). It is
From (42), we calculate \(k(z), l(\bar{z})\).
and the second independent integral of the PDE (13 is found from (42). It is
The general solution of the PDE (13) is given by (43), i.e. \({\mathcal {F}}(c_{1}, \; c_{2})\) = 0 where \({\mathcal {F}}\) is an arbitrary function and the constants \(c_{1}\) and \(c_{2}\) are defined in (51) and (52) respectively. Furthermore, in order to find an analytic solution for the slope function \(\gamma = \gamma (u,v)\), we shall follow the methodology developed in Sect. 3.3.
Then, with the aid of (45), we find
and from (48) we get the slope function \(\gamma \). The result is
After all, we can confirm that the relations (49), (50) and (53) satisfy the PDE (13), or, equivalently, the PDE (9).
(b) Real potential producing a family of complex orbits: We consider the same surface as previously and now we select
We determine the potential function from (23). It is
Now, the first independent integral of the PDE (13) can be found from (29). It is
From (42), we calculate \(k(z), \; l(\bar{z})\).
and the second independent integral of the PDE (13) is found from (42). It is
Using the classical type of De Moivre for complex numbers, i.e., \(z = \rho e^{i\theta }\) where \(\rho \) = \(|z |\) is the modulus of z and \(\theta \) is the argument of z, we get: \(\bar{z} = \rho e^{-i\theta }\) and we can rewrite the expessions of \(c_{1}\) and \(c_{2}\) in a concise form. We estimate the quantities
and we take
The general solution of the PDE (13) is given by (43), i.e. \({\mathcal {F}}(c_{1}, \; c_{2})\) = 0 where \({\mathcal {F}}\) is an arbitrary function and the constants \(c_{1}\) and \(c_{2}\) are defined in (57) now. Furthermore, if we want to find an analytic solution for the slope function \(\gamma = \gamma (u,v)\), we shall follow the methodology developed in Sect. 3.3.
Then, by using the relation (45), we find
and from (48) we get the slope function \(\gamma \). This is
After all, we can confirm that the relations (49), (54) and (58) satisfy the PDE (13).
4.2 Real Potentials Producing Families of Real Orbits
In this section we shall focus our interest on real potentials. If we set
in (23), then we must have
We note here that the functions \(a(u,v), \; b(u,v)\) satisfy the Cauchy–Riemann conditions: \(a_{u} = b_{v}\) and \(a_{v} = -b_{u}\). So, the potential takes the form
The physical meaning of the sign minus (−) in (59) is the following: since the total energy is zero for all orbits, the potential must be not positive. Putting
we take by using (42)
and slope function \(\gamma \) can be found from the general solution (43).
4.3 An Appropriate Selection for the Slope Function \(\gamma \)
Using the relation (43), we can select the following formula
where \({\mathcal {B}}\) is an arbitrary function of one argument. In doing so, the general solution (43) can be written as follows:
By using (46), the solution (62) can be written as
Then we calculate the argument of the function \({\mathcal {B}}\) in (63). It is
We substitute (61) and (64) in (63) and we obtain
For real functions \(\gamma (u,v)\), the function R in (64) is real too. Thus, the right hand side of (65) must be a real function Q(R) of the real argument R. We set
and the requirement
is satisfied when
Proposition 3
All real families of orbits \(\gamma = \gamma (u,v)\), which are characterized with zero total energy, are produced by real potentials (59) and are given by (67) in an implicit form.
Example 2
We consider the chain surface with parametric representation
It is well-known that this surface is minimal. The components of the metric tensor are
If we select K(z) = z, \(L(\bar{z})\) = \(\bar{z}\), then we determine the real potential from (59):
In view of (59) and using the relation (71), we get
Now, we can find the first independent of the PDE (13) integral from (29). It is
We compute \(T_{1}\) and \(T_{2}\) from (60) and we find
From (61), we calculate \(k(z), \; l(\bar{z})\).
and the second independent integral of the PDE (13) is found from (42). It is
The general solution of the PDE (13) is given by (43), i.e. \({\mathcal {F}}(c_{1}, \; c_{2})\) = 0 where \({\mathcal {F}}\) is an arbitrary function and the constants \(c_{1}\) and \(c_{2}\) are defined in (73) and (74) respectively. Furthermore, in order to find an analytic solution for the slope function \(\gamma = \gamma (u,v)\), we shall follow the methodology developed in 4.3.
Without loss of generality, we select
and from (68) we take
By using (66), Eq. (76) can be written as
By replacing (77) into (65), we obtain
Thus, we have
or, equivalently,
In view of (64) and with the aid of (78), we find one solution for \(\gamma \). It is
After all, we can confirm that the relations (70), (71) and (79) satisfy the PDE (13), or, equivalently, the PDE (9). In Fig. 1 we present the surface S defined in (69) and the contour plot of the slope function \(\gamma = \gamma (u, v)\) given by (79).

5 Special Cases of the PDE (9)
In this Section we shall study different solvable cases of the PDE (9). We shall not restrict ourselves in (11) and we shall examine some other categories of surfaces in which we can find the general solution of (9) when we select a potential function properly.
-
Case I: Supposed that given a potential function V(u, v) and an appropriate metric, the coefficients \(\delta _{j}\) (j = 0,1,2,3) are such that
$$\begin{aligned} \delta _{3} = \delta _{1} = b(v), \; \; \delta _{2} = \delta _{0} = 0. \end{aligned}$$Then the PDE (9) is solvable and can be written as
$$\begin{aligned} \gamma \gamma _{u}-\gamma _{v} = -\Big ( \delta _{3}\gamma ^3 +\delta _{1}\gamma \Big ). \end{aligned}$$(80)Then the system of subsidiary equations reads
$$\begin{aligned} \frac{{du}}{{\gamma }} = \frac{{dv}}{{-1}} = -\frac{{d\gamma }}{{(\gamma ^2+1)\gamma b(v)}} \end{aligned}$$(81)whereupon
$$\begin{aligned} \int \frac{{d\gamma }}{{(\gamma ^2+1)\gamma }} = \int b(v) dv + \log {\vert c_{1} \vert }, \end{aligned}$$with \(c_{1}\) = const., or, equivalently,
$$\begin{aligned} \log {\arrowvert \frac{{\gamma }}{{\sqrt{1+\gamma ^2}}} \arrowvert } - \int b(v) dv = \log {\vert c_{1} \vert }. \end{aligned}$$Now we find \(\gamma \). It is
$$\begin{aligned} \gamma = \pm \frac{{p}}{{\sqrt{1-p^2}}}, \; \; p: = c_{1}e^{\int b(v) dv} \end{aligned}$$(82)We keep the sign minus (−) and we replace (82) in the first of equations (81). Again from (81), we find a second integral of (80); it is
$$\begin{aligned} u = \int \frac{{p}}{{\sqrt{1-p^2}}} dv + c_{2}, \end{aligned}$$with \(c_{2}\) = const. So, the general solution of the PDE (80) is given by \({\mathcal {F}}(c_{1}, \; c_{2}) = 0\), where \({\mathcal {F}}\) is an arbitrary function.
-
Case II: Supposed that given a potential function V(u, v) and an appropriate metric, the coefficients \(\delta _{j}\) (j = 0,1,2,3) are such that
$$\begin{aligned} \delta _{3} = \delta _{1} = \delta _{0} = 0, \; \; \delta _{2} = b(u). \end{aligned}$$Then the PDE (9) is solvable. The system of subsidiary equations reads
$$\begin{aligned} \frac{{du}}{{\gamma }} = \frac{{dv}}{{-1}} = -\frac{{d\gamma }}{{b(u)\gamma ^2}}. \end{aligned}$$(83)From (83), we obtain
$$\begin{aligned} \log {\gamma }+\int b(u) du = \log {\vert c_{1}\vert }, \end{aligned}$$with \(c_{1}\) = const., or, equivalently,
$$\begin{aligned} \gamma e^{\int b(u) du} = c_{1}. \end{aligned}$$Now we find \(\gamma \). It is
$$\begin{aligned} \gamma = c_{1} e^{-\int b(u) du} : = p(u). \end{aligned}$$(84)Again from (83) and with the aid of (84), we obtain
$$\begin{aligned} \frac{{du}}{{p(u)}} = -dv \end{aligned}$$or, equivalently,
$$\begin{aligned} v+ \int \frac{{du}}{{p(u)}} = c_{2}, \end{aligned}$$(85)with \(c_{2}\) = const. So, the general solution of the PDE (9) is given by \({\mathcal {F}}(c_{1}, \; c_{2}) = 0\), where \({\mathcal {F}}\) is an arbitrary function.
Example 3
We consider the helicoid surface with parametric representation
Then the components of the metric tensor are
We choose a real potential of the form
We compute the quantities \(\delta _{j}\) (\(\; j = 0,1,2,3\)) in (10) and we find
So, this example belongs to the ”Case II” which was developed above. With the aid of (84) and (85), we shall find two independent integrals of (9). These are
and
and the general solution of (9) is
where \({\mathcal {F}}\) is an arbitrary function and the constants \(c_{1}, \; c_{2}\) are defined in (86) and (87) respectively. Considering the surfaces of torus or pseudosphere, we can obtain analogous results.
Case III: If the given potential function V(u, v) and the components of the metric tensor are such that \(\delta _{j}\) = const. (j = 0,1,2,3), then we can proceed to the computation of the general solution of the PDE (9) as follows. We write (9) in a simpler form
where
The general solution of (89) is (see [22], Section 2.3):
where \({\mathcal {F}}\) is an arbitrary function of its argument.
Case IV. Especially, for the case \(\delta _{3} = \delta _{2} = \delta _{1} = \delta _{0}\) = 0, the PDE (9) reads
which is the well-known Burger’s equation and the general solution of it is
where \({\mathcal {F}}\) is an arbitrary function of its argument.
Example 4
We assign the Enneper’s surface with parametric representation
It is well-known that this surface is minimal. We compute the components of the metric tensor and we find
We then select
After a lengthy computation, we find that
Thus, the totality of isoenergetic families of orbits is given by (90). For instance, if we select \({\mathcal {F}}(s)\) = 2s (s = \(u+\gamma v\)), then from (90) we take \(\gamma \) = \(2(u+\gamma v)\) or, equivalently,
Now, we can determine the monoparametric family of orbits. In view of (3), we have
or, equivalently,
where \(c = \)const. We solve the above equation w.r.t. u and we find
Then we replace (93) into (91) and we take one monoparametric familes of curves
where
and \(c = const.\) is the parameter of the family (94). Let us denote by \(\varGamma _{c}\) the curve of the above family which corresponds to an arbitrary value of the parameter c. Let \(\kappa _c\)and \(\sigma _c\) be the curvature and the torsion respectively of the curve \(\varGamma _{c}\). By direct computation we find
This fact characterizes the curves of constant slope ([23], pp. 246), i.e., the curves whose unit tangent vector forms a constant angle \(\phi _{c}\) with a constant unit vector \(\bar{\delta _{c}}\). The latter vector is given by
and for the slope of \(\varGamma _{c}\) yields
We note here that all these vectors \(\bar{\delta _{c}}\) are parallel to the level yz. After all, we summarize these observations in the following.
Corollary 2
Each member of the family (94) on the Enneper’s minimal surface (91) is a curve of constant slope whose unit tangent vector forms a constant angle with a fixed unit vector which is parallel to the level yz.
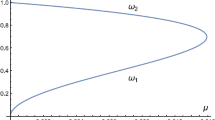
In Fig. 2 we present the surface S defined in (91) and the curves of (94) which correspond to \(c = 1.5, 2, 3, 4\).

6 Concluding Comments
In the present study we examined monoparametric families of orbits (1) which are described by a test particle with zero constant energy on the given surface S. For \({\mathcal {E}}\) = \({\mathcal {E}}_{0} = \)0, the first order PDE given by [1] can be solved from the direct and from the inverse view point of the problem. From the direct view point, given the potential function V = V(u, v), we can determine the unique family of orbits on a given surface. From the inverse view point, given the family of orbits f(u, v) = c on a certain surface, we can determine the potential function up to a multiplicative factor. If the family is not isoenergetic, we can use the second order PDE given by [4] to determine the potential function V = V(u, v).
In the whole paper we dealt with a version of the direct problem of the Newtonian dynamics namely if a potential function V = V(u, v) is given, then we find all the monoparametric families of orbits (1) which are described by a test particle with constant energy \({\mathcal {E}}\) = \({\mathcal {E}}_{0}\) = 0 on a given surface (1) under the action of this potential. We established a new PDE for the slope function \(\gamma \) = \(\displaystyle {\frac{{f_{v}}}{{f_{u}}}}\), the PDE (9). If we select an isothermic system of coordinates, then this equation takes a more concise form so that can it be handled easier. This PDE, i.e. (13), drew the attention of the author. Furthermore, weakly integrable systems at zero energy level were studied by [24].
In Sect. 3 we found a necessary and sufficient condition, i.e., Eq. (23), which must be satisfied by the potential function V(u, v) and another one for the slope function \(\gamma \), i.e., Eq. (37) so that the above PDE has solution. Proceeding more, we found the general solution of the PDE (13). These potentials are generally complex. Furthermore, real potentials producing families of real orbits were studied in Sect. 4. Special cases of the PDE (9) were also studied in Sect. 5. Supposed that given a potential function V(u, v) and an appropriate metric, the coefficients \(\delta _{j}\) (j = 0,1,2,3) can be written in a more concise form, then we concluded that the PDE (9) is solvable and the general solution of it can be found analytically. We note here that a unified method for solving linear and certain nonlinear PDEs was developed in [25]. All the computations were made by the symbolic algebra program MATHEMATICA 11.0.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Mertens, R.: On Szebehely’s equation for the potential energy of a particle describing orbits on a given surface. ZAMM. 61, 252–253 (1981)
Szebehely, V.: On the determination of the potential by satellite observations. In: Proverbio, G. (ed.) Proceeding of the International Meeting on Earth’s Rotation by Satellite Observation, pp. 31–35. The University of Cagliari, Bologna (1974)
Bozis, G.: Generalization of Szebehely’s equation. Celestial Mech. 29, 329–334 (1983). https://doi.org/10.1007/BF01228527
Bozis, G., Mertens, R.: On Szebehely’s Inverse Problem for a particle describing orbits on a given surface. ZAMM. 65, 383–384 (1985). https://doi.org/10.1002/zamm.19850650816
Puel, F.: Intrinsic formulation of the equation of Szebehely. Celestial Mech. 32, 209–216 (1984). https://doi.org/10.1007/BF01236600
Bozis, G.: Szebehely’s inverse problem for finite symmetrical material concetrations. Astron. Astrophys. 134, 360–364 (1984)
Bozis, G.: The inverse problem of dynamics: basic facts. Inverse Probl. 11, 687–708 (1995). https://doi.org/10.1088/0266-5611/11/4/006
Borghero, F., Bozis, G.: Isoenergetic families of planar orbits generated by homogeneous potentials. Meccanica. 37, 545–554 (2002). https://doi.org/10.1007/BF00049418
Bozis, G., Ichtiaroglou, S.: Boundary curves for families of planar orbits. Celestial Mech. 58, 371–385 (1994). https://doi.org/10.1007/BF00692011
Anisiu, M., Bozis, G.: Families of orbits in planar anisotropic fields. Astronomische Nachricthen. 326, 75–78 (2005). https://doi.org/10.1002/asna.200410259
Borghero, F.: On the determination of forces acting on a particle describing orbits on a given surface. Rendiconti di Mathematica e delle sue applicazioni, Serie VII. 6, 4 (1986)
Whittaker, E.T.: A Treatise on the Analytical Dynamics of Particle and Rigid Bodies. Cambridge University Press, Cambridge (1994)
Melis, A., Borghero, F.: On Szebehely’s problem extended to holonomic systems with a given integral of motion. Meccanica 21, 71–74 (1986)
Borghero, F., Melis, A.: On Szebehely’s problem for holonomic systems involving generalized potential functions. Celest. Mech. Dyn. Astron. 49, 273–284 (1990). https://doi.org/10.1007/BF00049418
Bozis, G., Borghero, F.: Family boundary curves for holonomic systems with two degrees of freedom. Inverse Probl. 11, 51–64 (1995). https://doi.org/10.1088/0266-5611/11/1/003
Kotoulas, T.: On the determination of the generalized force field from a two-parametric family of orbits on a given surface. Inverse Probl. 21, 291–303 (2005). https://doi.org/10.1088/0266-5611/21/1/018
Kotoulas, T., Ichtiaroglou, S.: Motion on a given surface: Monoparametric families of orbits sufficient for separability. J. Geom. Phys. 56, 2447–2461 (2006). https://doi.org/10.1016/j.geomphys.2006.01.002
Kotoulas, T.: Inverse problem of dynamics in non-flat spaces: solvable cases of the two basic equations. Mathematica 49, 35–47 (2007)
Kotoulas, T.: Isoenergetic families of regular orbits on a given surface. Differ. Geom. Dyn. Syst. 10, 206–214 (2008)
Kobayashi, S., Nomizu, K.: Foundations of Differential Geometry, vol. 2. Wiley, New York (1969)
Contopoulos, G., Bozis, G.: Complex force fields and complex orbits. J. Inverse. Ill-Posed Probl. 8, 1–14 (2000)
Polyanin, A.D., Zaitsev, V.F., Moussiaux, A.: Handbook of First Order Partial Differential Equations. Taylor and Francis, London (2002)
Gray, A., Abbena, E., Salamon, S.: Modern Differential Geometry of Curves and Surfaces with Mathematica, 3rd edn. Chapman and Hall/CRC, Boca Raton, FL (2006)
Pucacco, G.: On integrable hamiltonians with velocity dependent potentials. Celest. Mech. Dyn. Astron. 90, 109–123 (2004). https://doi.org/10.1007/s10569-004-1586-y
Fokas, A.S.: A unified transform method for solving linear and certain nonlinear PDEs. Proc. R. Soc. Lond. A 453, 1411–1443 (1997)
Acknowledgements
I would like to thank the Referee for his valueable comments and Prof. S. Stamatakis, Department of Mathematics, A.U.Th for many useful discussions.
Funding
There were no funds for this work to the author Thomas Kotoulas.
Author information
Authors and Affiliations
Contributions
The present work in this paper is totally carried out by the author: Thomas Kotoulas. He wrote the manuscript, derived the equations, carried out the computations using the symbolic algebra program MATHEMATICA 11.0, solved the problem analytically, produced results and verified them.
Corresponding author
Ethics declarations
Conflict of interest
The author declares that he has no conflict of interest.
Rights and permissions
Open Access. This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kotoulas, T. A Nonlinear PDE for Families of Orbits on a Given Surface. J Nonlinear Math Phys 29, 601–625 (2022). https://doi.org/10.1007/s44198-022-00053-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s44198-022-00053-w
Keywords
- Inverse problem of Newtonian dynamics
- Monoparametric families of orbits
- Two-dimensional potentials
- Complex variables
- Nonlinear partial differential equations
- Differential geometry in physics